KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24An implantable micro-robot without an actuator
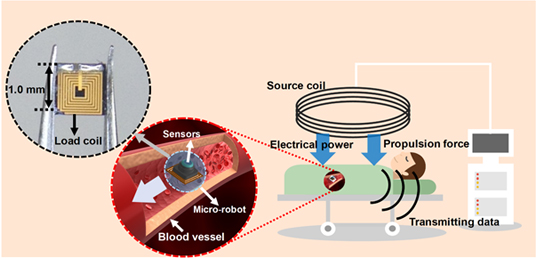
A research team at KAIST has proposed the novel idea of generating propulsion for micro-robots through wireless power transfer, which can eliminate the use of separate actuators. Lorentz force is used as a source of propulsion, which is generated by the magnetic field and by induced current, which occurs when electrical energy is being transferred in the wireless power transfer system.
Article | Fall 2017
Micro-robots are an emerging technology small enough to move around inside the human body. Currently, micro-robots can only carry out relatively simple functions, in many cases supervised or directly tele-operated by a clinician. However, as research on micro-robots progresses, we expect micro-robots capable of carrying out complex sequences of operations will come true in the near term because of the current state-of-the-art in technology; also, the scaling of physical effects will make the downscaling of certain technologies fundamentally infeasible. As technology improves, more complex micro-robots can be made to address combinations of these simple projects.
Nevertheless, one thing is certain in micro-robotics, increased electrical and mechanical energy is necessary to perform more complex missions. Currently, most studies have adopted an external magnetic field to generate the propulsion force. However, such micro-robots have limitations to perform complex missions because they cannot provide electrical energy for supplying active circuits inside the micro-robot.
To overcome this limitation, Professor Seungyoung Ahn and his team introduced a novel method of providing propulsion to the micro-robots using wireless power transfer, which eliminates the need for actuators. Their research has great significance in suggesting a simple design structure that can simultaneously deliver propulsion and electrical energy through a wireless power transfer system.
The operation of a wireless power transfer system is based on a time varying magnetic field and its generated current. The team has researched whether these two physical qunatities can be used to generate Lorentz force. As a result, they found that the Lorentz force in a load coil cannot be generated because the wireless power transfer system adopts LC resonance. LC resonance is widely used for wireless power transfer because it minimizes the impedance of a circuit and, thus, achieves maximum power transfer efficiency. However, under these conditions, the time-average Lorentz force in a period cannot be generated because of the 90-degree phase difference between the source current and load current. The phase difference is a factor of the cosine function that determines the magnitude and direction of Lorentz force. Therefore, the phase difference between the source current and load current is controlled to avoid 90 degrees. This will be able to generate Lorentz force, which provides a source of propulsion for micro-robots. This principle is a breakthrough in micro-robotics as it can supply mechanical and electrical energy wirelessly, while having a simple structure suitable for miniaturization.
Professor Ahn’s team is focused on miniaturization, while maximizing the mobility and number of tasks that can be performed by the micro-robots. The micro-robot has been miniaturized to 1 mm x 1 mm x 0.3 mm, and it is expected to shrink further in the future.
Articles on this research (entitled “Magnetic Resonant Wireless Power Transfer for Propulsion of Implantable Micro-Robot,” Journal of Applied Physics (2015); “Generation of Magnetic Propulsion Force and Torque for Micro-Robot using Wireless Power Transfer Coil,” IEEE Transactions on Magnetics (2015), and “High Efficiency Wireless Power and Force Transfer for Micro-robot using Multil-axis AC/DC Magnetic Coil,” IEEE Transactions on Magnetics (2017)) were published in academic journals.
Most Popular

When and why do graph neural networks become powerful?
Read more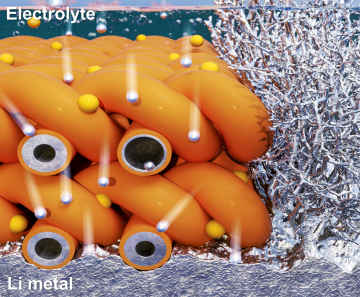
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more