KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24Key technology for reusable launch vehicles: fuel-optimal landing guidance and control algorithms
Key technology for reusable launch vehicles: fuel-optimal landing guidance and control algorithms
A key technology that enables a reusable launch vehicle to land precisely on a specific target point is developed. The technology features a computational guidance algorithm optimizing the fuel consumption while meeting various flight constraints and a precise attitude control algorithm for a safe landing. The effectiveness of this new technology has been verified through a high-fidelity simulation of a reusable rocket demonstrator in collaboration with INNOSPACE.
Article | Fall 2022
Have you thought about why the country has put a lot of effort into developing its own space rocket? The answer to this question is as clear as day. As space rocket technology is closely related to military use, no one wants to share their classified technology. Recently, South Korea successfully launched its first homegrown Nuri space rocket into orbit. Through the successful launch of Nuri, the country can have its own space rocket technology, which would be the first step to South Korea becoming a leading country in space exploration. This raises the question of what the next step for the Nuri space rocket will be. One possible direction for improving the Nuri space rocket would be to reuse the rocket’s first stage so as to reduce the cost of the expensive launches, as in SpaceX’s Falcon 9. However, landing guidance and control technology remains veiled.
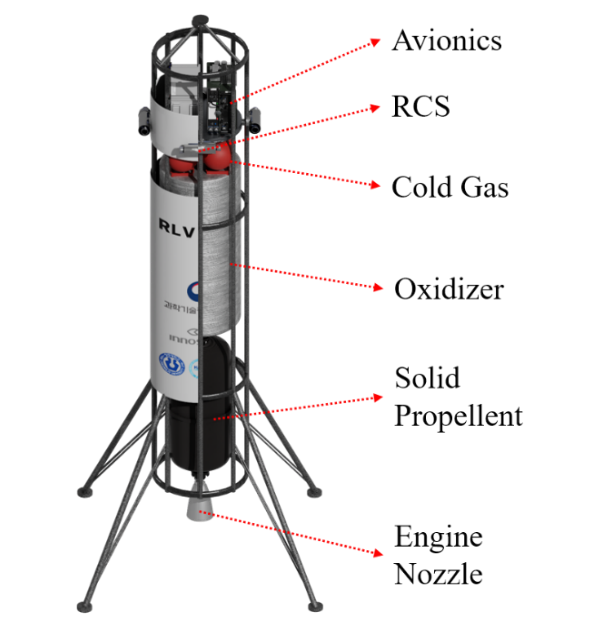
Industry-university collaborative work by Prof. Chang-Hun Lee in the Dept. of Aerospace Engineering at KAIST and INNOSPACE, a company that develops hybrid rocket-powered smallsat launchers, has unveiled a core technology for reusable launch vehicles. They developed a real-time computational guidance algorithm that generates a fuel-optimal trajectory while satisfying various flight constraints and a precise attitude control algorithm by utilizing a thrust vector control system (TVC) and reaction control system (RCS). They also tested and verified their algorithms through a high-fidelity simulation of a reusable rocket demonstrator, as shown in Fig. 1.
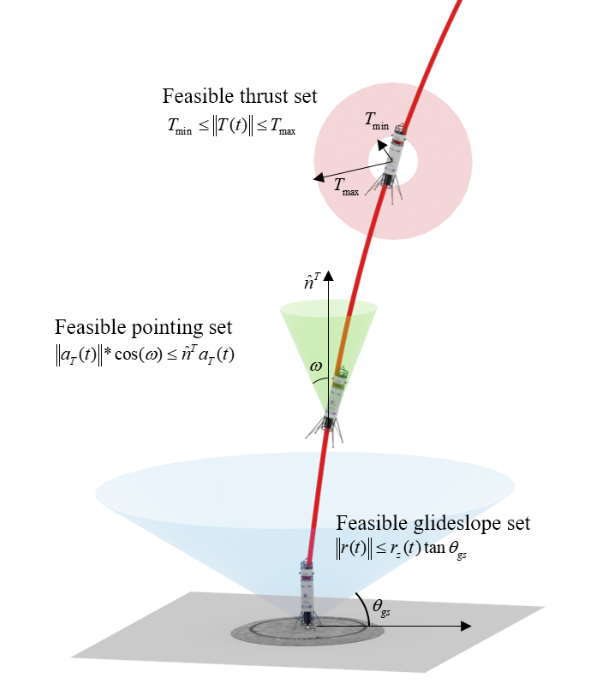
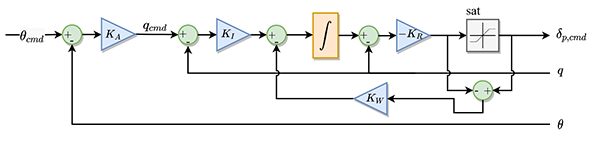
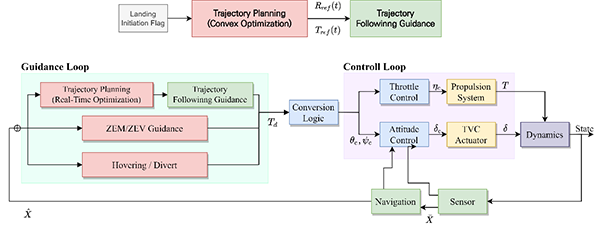
The landing guidance problem for a reusable launch vehicle is much more complicated than a typical guidance problem owing to numerous practical constraints (e.g., engine throttle limit, glideslope constraint, attitude angle constraint, and terminal boundary condition for a vertical and soft landing, as shown in Fig. 2) and highly time-variant, nonlinear dynamics. Traditional guidance design approaches that rely on approximated models by linearization, unrealistic assumptions, and offline design techniques are unable to handle this level of complexity. Additionally, the attitude control problem for a reusable rocket is challenging due to model uncertainties, sloshing, and structural bending during the landing phase. The research team proposed a method that effectively transforms the original nonconvex optimization problem into a set of sequential convex subproblems by utilizing a convexification and relaxation technique. By exploiting the favorable features of convex programming – guaranteeing fast and finite-time global convergence – onboard real-time computational guidance for a fuel-optimal landing was realized. A three-loop-based attitude control algorithm, as shown in Fig. 3, was utilized to ensure robustness against model uncertainties. Figure 4 presents the overall structure of the developed guidance and control algorithms.
Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more