KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24T-skin: An Artificial Neural Tactile Sensing System
An artificial neural tactile skin system that mimics the human tactile recognition process using a particle-based polymer composite sensor and a signal-converting system was developed. This human-like system is applicable to robotics and prosthetics to provide real tactile sensations in e-skin via flexible electronics that are able to mimic the functionalities of human skin.
Article | Fall 2022
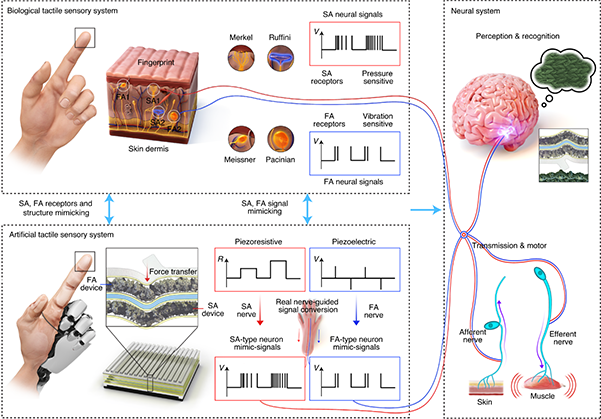
Human tactile perception is a complex process related to the detection of pressure and vibration in spatiotemporal mechanical deformations on glabrous skin. In particular, human skin perceives tactile stimuli through cutaneous mechanoreceptors (a sensory receptor that responds to mechanical stimulation) in which slow adaptive (SA) and fast adaptive (FA) receptors respond sensitively and selectively to static pressure and vibration (high-frequency dynamic pressure). While various strategies have been developed to mimic each receptor type, there have only been a few demonstrations of sensors that can achieve both functions simultaneously. Moreover, the development of practical tactile perception systems will also require sensors that are human-compatible (thin, lightweight, adhesive and deformable) and economical (cheap and mass-producible using a simple fabrication process). Recent approaches have shown that tactile recognition systems can be mimicked by creating artificial mechanoreceptors and afferent nerves, with the integration of these components via bioinspired approaches. However, the previously used simple approaches have only been based on intervals (SA) or solely on/off processes (FA). This is in contrast to biological processes, where humans perceive tactile sensations on the basis of specific discharge patterns, which depend on the specific shape and roughness of the surface or object.
To address these issues, a research team under Professor Seongjun Park in the Department of Bio and Brain Engineering at KAIST invented a bio-inspired artificial neural tactile system (t-skin). The tactile skin device was fabricated by incorporating SA-mimicking rGO (reduced graphene oxide) sheets and FA-mimicking BaTiO3 (barium titanate) nanoparticles in a polymeric soft matrix (PDMS), providing sensors that are simultaneously sensitive to pressure and vibration. Also, a system that simultaneously modulates the SA and FA sensor outputs into neuron-mimicking signals separately was developed. The signal-conversion mechanism is based on the recorded response patterns of mouse nerves ex vivo (experimentation done on tissue from an organism in an external environment with minimal alteration of natural conditions) to pressure and vibration stimuli to the hindpaw. The data used in the conversion process are based on a mathematical function that uses the interspike interval (ISI) of the firing activity of single nerve fibers. After single-fiber recording and a type differentiation process, the team produced a model equation reflecting the ISI according to the force level. With developed system, it is proved that converted signals can be fully transmitted in real nerves or can generate the synaptic transmission required to trigger muscle contraction. In addition, an artificial finger consisting of the t-skin system could learn and classify fine and complex textures with a deep learning technique while also predicting unknown textures on the basis of learned textures.
In the future, the developed artificial tactile sensing system could be integrated into existing or newly developed robotic/prosthetic systems to replicate the human sense of touch. This could significantly improve the wearer’s performance on tasks that involve touching, grasping and manipulating objects. Moreover, the signal-conversion mechanism as presented in the research could be used to synthesize information pertaining to the real sense of touch, which can in turn be utilized in metaverse and telecommunications areas. Lastly, the idea using biomimetic signals could be applied to develop artificial organs to restore other senses (e.g., sight, hearing, taste, smell) for those who are disabled.
This research was published on June 03, 2021 in Nature Electronics under the title “An Artificial Neural Tactile Sensing System’” (Nature Electronics 4, 429-438 (2021)).
Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more