KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24Sensing accident-prone features in urban scenes for proactive driving and accident prevention
Sensing accident-prone features in urban scenes for proactive driving and accident prevention
This work proposes an attentive driving system based on visual notifications for proactive accident prevention. Context-specific accident-prone features are identified and drivers are notified of the detected accident-prone features in a proposed head-up display to enhance their decision-making.
Article | Fall 2022
Visual information when it pervades along roadways and in roadway traffic can distract drivers in urban cities. In complex driving scenes, drivers are susceptible to accident and may miss important visual cues such as traffic signs and may encounter other accident-prone features. Accident-prone features can be any part of road view image that are highly related to accident phenomena. As an approach to avoid accidents due to missing these visual cues, this work proposes an attentive driving system based on visual notifications.
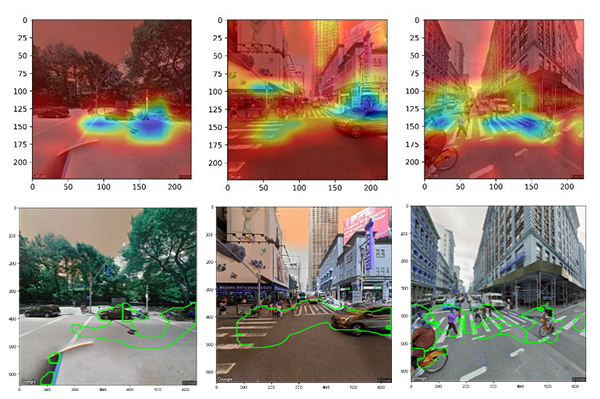
In contrast to existing approaches that leverage big multi-mode data, the proposed scheme relies only on one type of real-time data, i.e., street view images accessible by a dashcam. Using open-source accident data of New York City, locations of accident hotspots are identified and Google Street View images around those locations are used to train a family of deep convolutional neural networks (CNNs) with the goal of sensing (detecting) accident-prone features in urban scenes. The trained models (deep neural networks) are able to achieve accuracy up to 90% when classifying given urban scenes into accident hotspots by detecting accident-prone features. This is superior compare to the rate of 78% obtained by conventional schemes that use satellite images.
Further, the accident-prone feature detection performance by the family of CNNs is analyzed by a comparative study of four different class activation maps (CAMs) and pixel-level object class classification. The outputs of the CAMs are processed with an image processing pipeline responsible for the extraction of accident-prone features that are explainable to drivers. Given the considerable variability in training data, the trained CNN models are expected to be effective in other urban cities structurally similar to New York City for accident scene classification and subsequent accident feature identification. The usefulness of the accident-prone features for the prevention of accidents is evaluated by an ablation study. Accident-prone features are consisting only of 7% area on average, of the total area in each road view image sample. The ablation of these accident-prone features achieves 13% reduction in the possibility of classifying an area as an accident hotspot. Hence, the accident-prone features detected by the proposed scheme are indeed the causes of accidents. Further, simulations are performed to demonstrate the viability and impact of the attentive driving system using a windshield panel as a heads-up display.
This study is being reviewed in the “IEEE Transaction on Intelligent Transportation System”.
Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more