KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24Crash to Not Crash : Learn to identify dangerous vehicles using a simulator
Crash to Not Crash : Learn to identify dangerous vehicles using a simulator
A deep-learning-based vehicle collision prediction system was developed using data collected from a video game. The proposed system outperforms existing systems relying on simple rules by identifying various accident-related factors (such as nearby vehicles’ wheel angles, orientations, velocities) and is expected to save millions of people from fatal road crashes.
Article | Spring 2019
Nearly 1.3 million people die in road crashes each year, and 3 out of 4 deaths are caused by careless driving. The goal of the collision prediction systems (CPS) is to predict vehicle collisions as early as possible (via a variety of input sensors) to give warning ahead of collisions. In order to develop an efficient CPS, one needs to collect a large amount of labeled accident data. Unfortunately, it is difficult to collect accident data in the real world, and it is even more difficult to accurately annotate accident data.
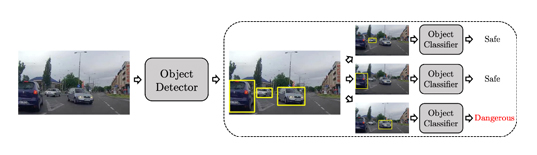
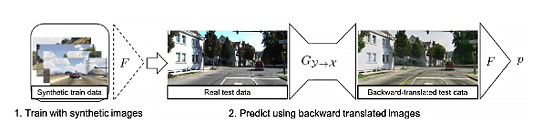
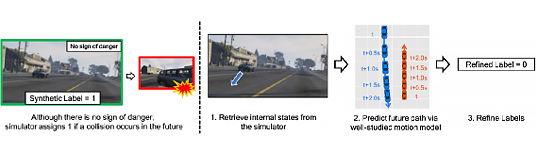
Professor Changho Suh and his team, Hoon Kim, Dr. Kangwook Lee, and Gyeongjo Hwang successfully overcame this challenge and developed a novel deep-learning-based collision prediction system which takes only a single camera as an input. They addressed the data scarcity challenge by developing a driving-simulator-based generator that can arbitrarily produce a wide variety of accident scenarios. Specifically, they manipulated low-level internal functions of a video game, Grand Theft Auto 5 (GTA V), to synthesize accident and non-accident scenes. However, they observed performance degradation when the model trained on synthetic dataset was tested on the real dataset, due to the differences between the synthetic and real datasets.

In order to solve this problem, they propose new domain adaptation techniques that refine synthetic images and labels, which they call “Backward Translation” and “Label Adaptation”, respectively. The team conducted extensive real-data experiments to demonstrate that the proposed dangerous vehicle classifier can reduce the missed detection rate by at least 18.5%, as compared to those trained with real data when time-to-collision is 1.6 ~ 1.8 seconds. Furthermore, unlike prior rule-based systems, their model correctly identifies a variety of accident-related factors (such as the wheel angles, orientations, and velocities of nearby vehicles) to enable high prediction accuracy for complex accident scenes.
This work will be published as a paper titled “Crash to Not Crash: Learn to Identify Dangerous Vehicles using a Simulator”, at AAAI 2019, one of the most prestigious and the largest academic conference in the field of artificial intelligence (acceptance rate 16.2% among 7095 submissions) and has been designated for oral presentation. This novel technology can replace the existing systems relying on simple rules, thereby contributing to a significant reduction in road crashes. In addition, it is recently established in the US as a law that every new car should equip a collision prediction system by 2022. This will result in increased demand of collision prediction systems, and the team is expected to play a major role in leading the emerging industry.
For more information, visit the project website :
https://sites.google.com/view/crash-to-not-crash
Most Popular

When and why do graph neural networks become powerful?
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Development of a nanoparticle supercrystal fabrication method using linker-mediated covalent bonding reactions
Read more